Acceptance analysis of social assistance robots
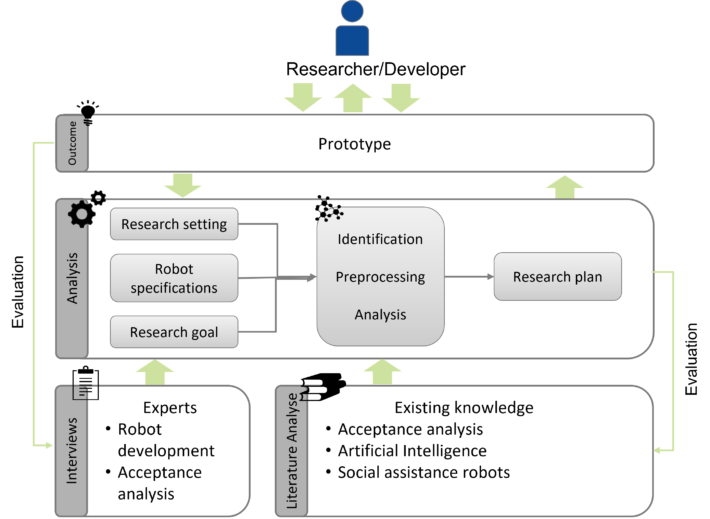
Social assistance robots, which not only provide physical assistance but also interact socially, are a technology of the future. However, their use and benefit highly depends on acceptance by the future users. To measure and analyze the acceptance of social assistance robots, researchers and developers currently use different methods. The identification of the suiting experimental method is time-consuming, and requires in-depth knowledge in acceptance analysis. The different research methods and the lack of a unified characterization of social robots make it difficult to compare the research results and to draw general conclusions. This dissertation project develops a model to assist researchers and developers in measuring acceptance of social assistance robots during their entire development phase. The presented approach uses existing knowledge, which is analyzed by Artificial Intelligence (AI) about the respective application and the social robot used in it.
Researcher

Publications
- Merz, N., Franke, J., & Bodendorf, F. (2022). Are we prepared for the Rise of Service Robots? – A Review on Acceptance Measurement. In The Human Side of Service Engineering.
DOI: 10.54941/ahfe1002585
BibTeX: Download - Merz, N., Huber, M., Bodendorf, F., & Franke, J. (2020). Science-Fiction Movies as an Indicator for User Acceptance of Robots in a Non-Industrial Environment. In SIGMIS-CPR 2020 – Proceedings of the 2020 Computers and People Research Conference (pp. 142-143). Nuremberg, DEU: Association for Computing Machinery, Inc.
DOI: 10.1145/3378539.3393847
BibTeX: Download